ROSCon 2019 Macau: A true zero copy RMW implementation for ROS2

Karsten Knese (Bosch), Michael Pöhnl (Bosch)
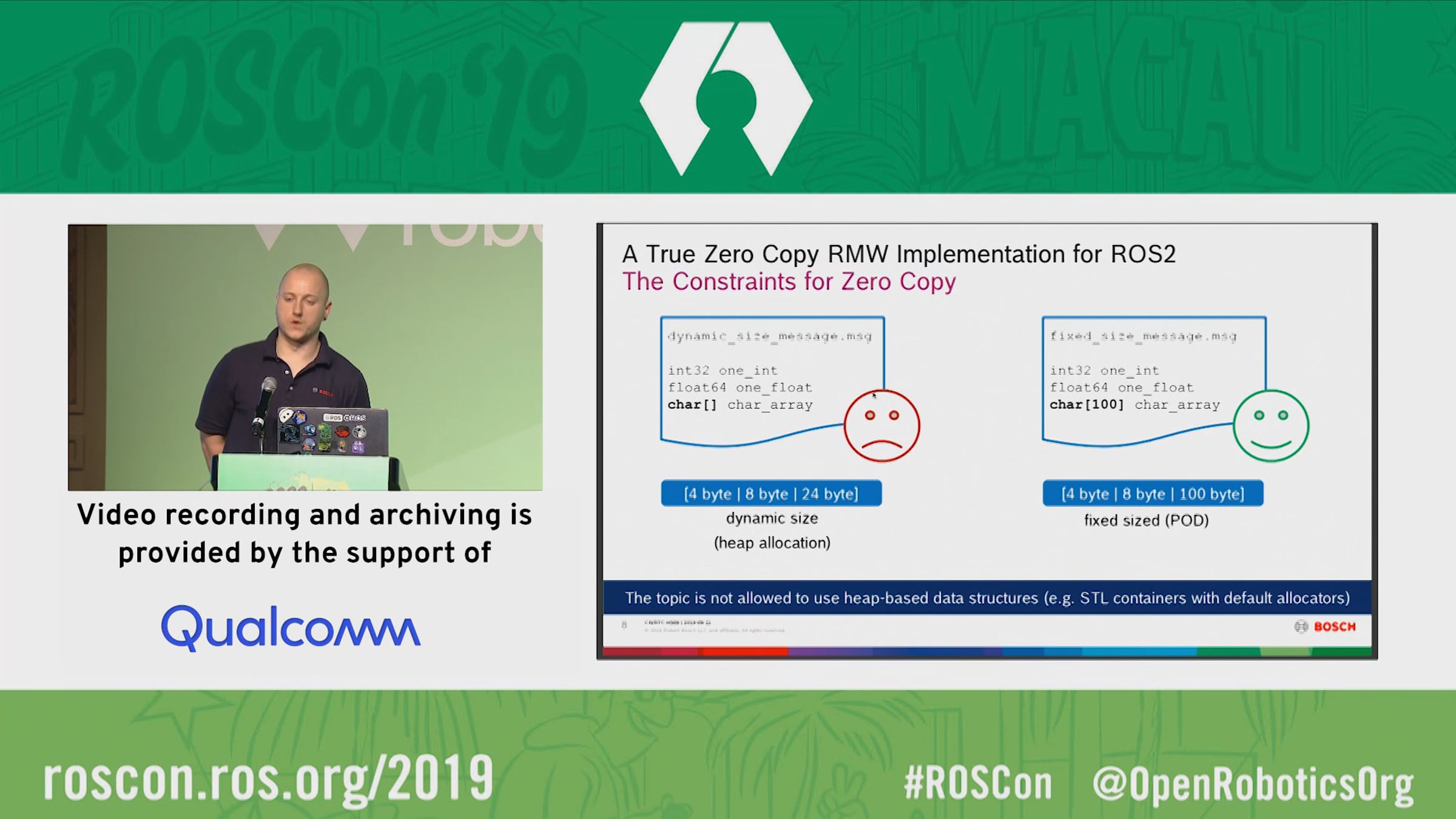
Bosch is going to open source a true zero-copy middleware for inter-process communication on modern robotics and vehicle computers. The shared memory based solution is compatible with Linux/QNX and achieves data independent communication in constant time without serializing data. We would like to present our recent development toward full ROS2 compatibility by providing a working RMW implementation. This implementation enables leveraging the tools around ROS2 with the speed of zero-copy data transfer…a powerful combination. We will present some timing analysis and finally introduce a bridge to existing DDS systems when extending the scope from shared memory to inter-machine communication.
Video presented at ROSCon 2019. More details and slides are available at: roscon.ros.org/2019/.
Get started for free
24/7 customer support
Our customer support team is available to help 24/7. Enterprise members also receive dedicated account managers and a guaranteed uptime SLA.
© 2026 Vimeo.com, Inc. All rights reserved.
TermsPrivacyYour Privacy ChoicesU.S State PrivacyCopyrightCookies